


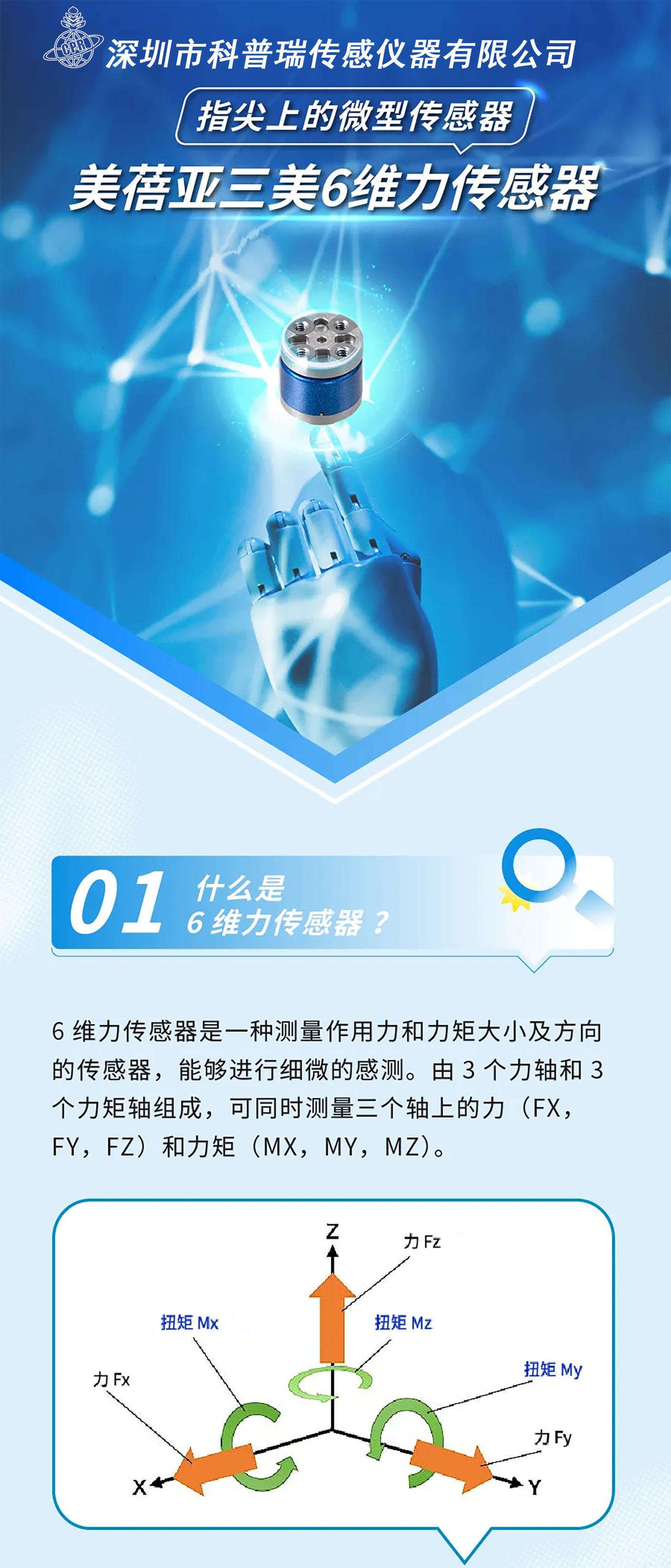
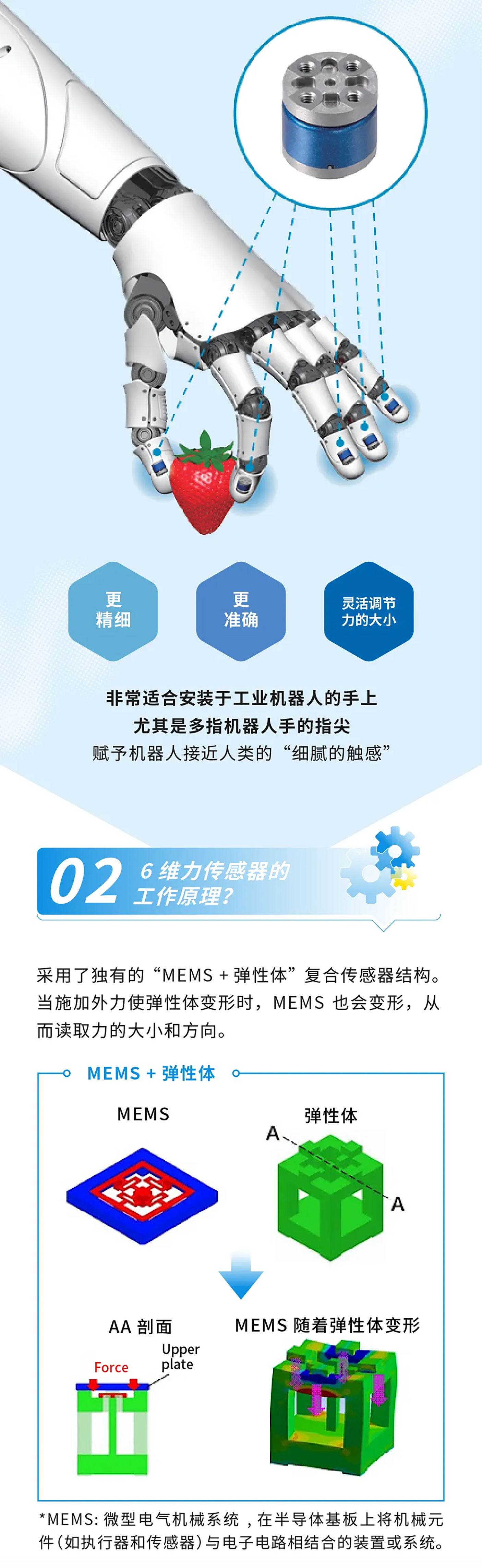
六轴力传感器又称为六维力传感器、六向力传感器,它是三个力分量(Fx、Fy、 Fz)和三个力矩分量(Tx、Ty、Tz)的六轴力/力矩传感器。用 MEMS 芯片和金属结构体的复合构造进行六轴感测。模块内置有 AFE IC,进行数字输出(I2C/SPI)。矩阵运算(消除其它轴的干扰分量)使用的补偿系数保存在 AFE IC 的内部存储器中,可以在快要开始测量前读出,因此用户不需要进行传感器和补偿系数的管理。另外,模块内内置有 LDO,实现了低噪声化。形状非常小巧轻便,特别适合搭载到机器人手指。



1、六轴力传感器的特点:
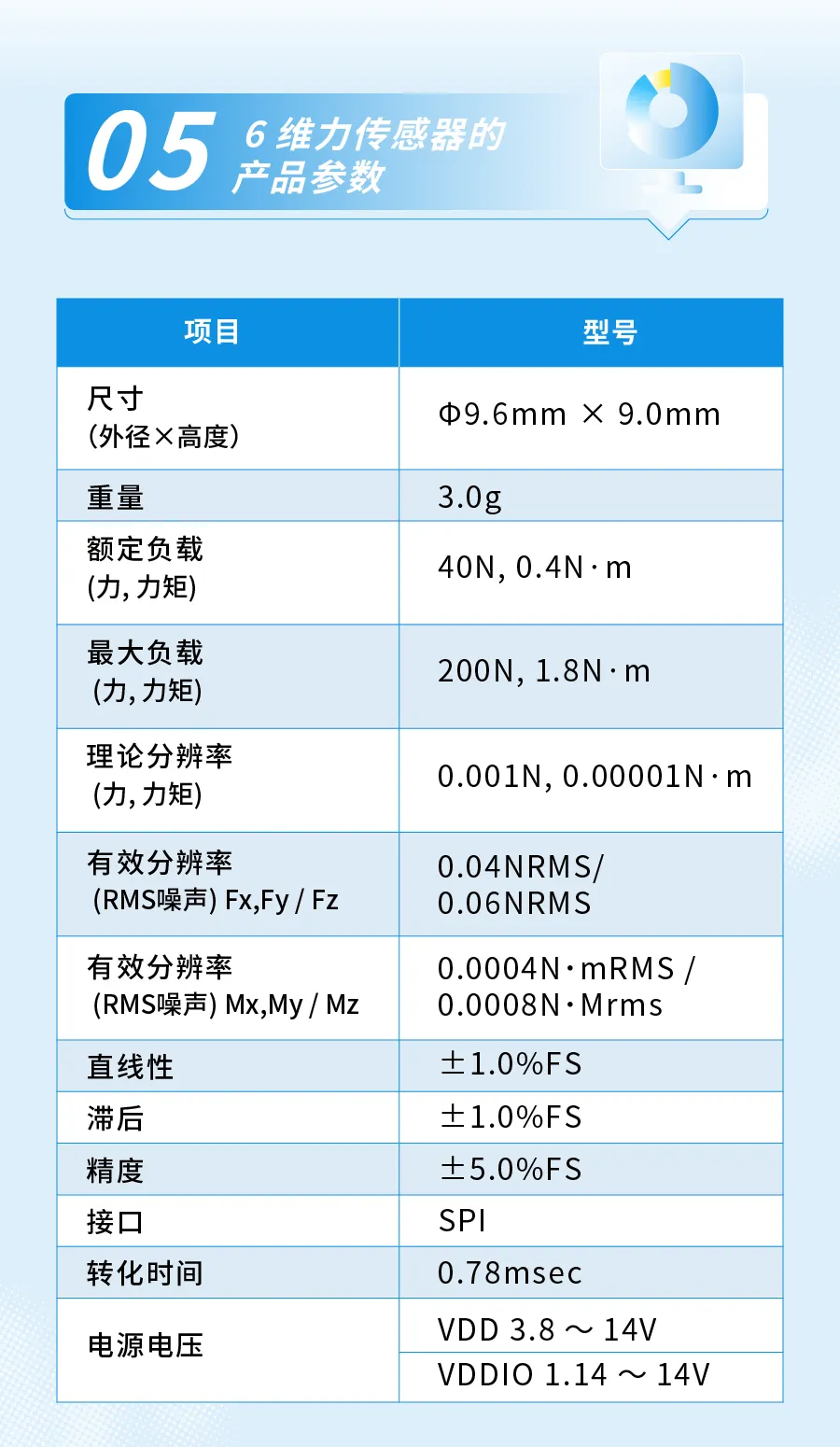
超小尺寸 :Φ9.6(W)×9.0(H)mm
超轻:3g
过载能力强 Fx, Fy, Fz:200N / Mx, My, Mz:1.8N・m
额定负载 Fx, Fy, Fz:40N / Mx, My, Mz:0.4N・m
通过内置 LDO 实现低噪声化
Fx, Fy:0.04N RMS / Fz:0.06N RMS
Mx, My:0.0004N・m RMS / Mz:0.0008N・m RMS
用内部定序器输出数字式六轴的值(I2C, SPI)
I2C 地址 Fx:0x71
Fy:0x72
Fz:0x73
Mx:0x74
My:0x75
Mz:0x76
2、六向力传感器的安装方法:
1>安装时,顶面、底面请都使用 4 颗 M1.6 的螺钉。插入顶面和底面安装孔的螺钉长度请控制在 1.7mm 以下。顶面和底面的安装孔都是深 1.8mm(min.1.7mm)的通孔。螺钉长度超过 1.7mm 时,存在传感器内部元件损伤、传感器损坏的风险。
2>位于顶面的φ1mm 和φ1.7mm 的圆孔或是 1.6×1.45mm 的方孔可用于定位。位于底面的φ1mm 圆孔和长孔可用于定位。
3>安装该传感器的 M1.6 螺钉的推荐拧紧力矩是 0.15N・m。
4>装配的时候不要一次把一颗拧到底,拧到微微用力即可。否则可能会无法正确检测力和力矩。甚至会有传感器损坏的风险。
5>拧紧螺钉的时候,请按各螺钉孔再沿对角线方向依次旋紧。请分至少两步,先预紧、再拧紧,用推荐的拧紧力矩进行拧紧。
例如:
第 1 圈 ①0.05N・m → ②0.05N・m → ③0.05N・m → ④0.05N・m
第 2 圈 ①0.15N・m → ②0.15N・m → ③0.15N・m → ④0.15N・m

